How to carefully handle the library
Introduction
As Said before some compiler options will make the use of the library risky. Here are some explainations. The library do not use pre-allocated buffer to store data instead of many others. The reason is that we want the user to be able to optimize the library to suit the best his needs. On some cases specially on embedded system, every byte count so we do not want to waste any space.Memory management
Here is how it work:- For any string allocation, the real size is calculated and the exact required size is allocated. If you think it takes too much ressource to perform these operations, simply don't use the debug system and/or compile the library without support for this.
- For any other data storage, the system allocate no space by default. If some space is required, the system allocate a default size (10 unit by default ) to store the new data. Each time the required space cannot be satisfied, a new space is allocated with more space in using a default incrmentation step (default to 10 units). Note that during this some data may be copied so this operation is time consuming.
How to make the work manually
To avoid automatic dynamic reallocation you should allocate the required space manually before allocating new states. Better than words, here is an example:StateMachine* stateMachine = allocStateMachine("MyStateMachine", "[Pref]"); State * S_1, *S_2, *MS_3, *S_3_1, *S_3_2; allocateSpaceForStates(stateMachine, 3, stateMachine); S_1 = allocateState(stateMachine, "FirstState", stateMachine); S_2 = allocateState(stateMachine, "SecondState", stateMachine); MS_3 = allocateState(stateMachine, "ThirdState", stateMachine); allocateSpaceForStates(MS_3, 2); S_3_1 = allocateState(MS_3, "FirstSubState", stateMachine); S_3_2 = allocateState(MS_3, "SecondSubState", stateMachine); freeStateMachine(stateMachine);
For exemple this code:
#include "StateMachine.h" int main(int argc, char** argv) { StateMachine* stateMachine = allocStateMachine("MyStateMachine", "[Pref]"); State * S_1, *S_2, *MS_3, *S_3_1, *S_3_2; setDbgParam(stateMachine, REALLOC_DBG); allocateSpaceForStates(stateMachine, 3); S_1 = allocateState(stateMachine, "FirstState", stateMachine); S_2 = allocateState(stateMachine, "SecondState", stateMachine); MS_3 = allocateState(stateMachine, "ThirdState", stateMachine); allocateSpaceForStates(MS_3, 2); S_3_1 = allocateState(MS_3, "FirstSubState", stateMachine); S_3_2 = allocateState(MS_3, "SecondSubState", stateMachine); freeStateMachine(stateMachine); }
[Pref] Reallocating space for state machine MyStateMachine from 0 to 3 [Pref] In state machine MyStateMachine, reallocating space for state ThirdState from 0 to 2
allocateSpaceForStates(stateMachine, 3);
allocateSpaceForStates(stateMachine, 2);
[Pref] Reallocating space for state machine MyStateMachine from 0 to 2 [Pref] Reallocating space for state machine MyStateMachine from 2 to 12 [Pref] In state machine MyStateMachine, reallocating space for state ThirdState from 0 to 2
- Note:
- This doesn't mean that the system need at least 12 unit of space but you now know that the real need is between 3 and 12 included.
Transition allocation.
The way you should manage transition allocation is basically the same as for the child states. Use the function void allocateSpaceForTransitions(State* state, int nbTransition) to allocate the space before you call any of the transition creation functions. If you are using the library with the DEACTIVATE_CHECKING option on, you have to allocate the space manually and to avoid to insert multiple transitions with the same ID. If you try to insert different transitions with the same ID the library will react in different way depending which options are on.- First case: if another transition with the same event ID is associated with the same state the library won't create the new transition and, depending of the debug options, will notify the problem.
- Second case: if a transition with the same ID is already assiciated with a parent or a child state, nothing will be notified, the transition will be created. When the event occurs, the transition associated with the deepest state will be triggered.
- If DEACTIVATE_CHECKING is activated. In the first case, the transition will be inserted and there is no guarantee of which one will be triggered when the event occurs. In the second case nothing change.
- If MAX_RUNTIME_SPEED. In the first case refers to previous description depending on whether or not DEACTIVATE_CHECKING is activated. In the second case, if the debug is not deactivated, a warning will be displayed (Associated with ALLOC_DBG debug flag). With MAX_RUNTIME_SPEED activated, using multiple transition with identical ID on parent or child state is deprecated. Even if it is safe, you might not be able to forecast which transition will be triggered when the event occurs as it is a complex dependence on the allocation order.
Advanced theory on transition allocation.
As optimisation really makes sense when MAX_RUNTIME_SPEED is activated we will consider in this section that this option is on.In this section we will consider the following simple state machine:
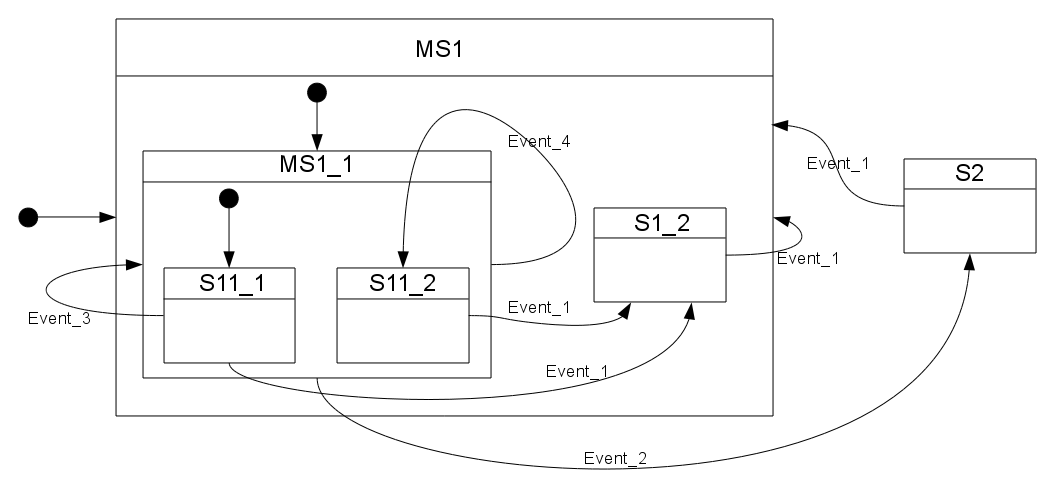
State Machine 4
StateMachine* stateMachine; State* MS_1, *MS1_1, *S1_2, *S11_1, *S11_2, *S2; stateMachine = allocStateMachine("myOptimizedStateMachine", "[OSM]"); setDbgParam(stateMachine, REALLOC_DBG); MS_1 = allocateState(stateMachine, "MS_1", stateMachine); S2 = allocateState(stateMachine, "S2", stateMachine); MS1_1 = allocateState(MS_1, "MS1_1", stateMachine); S1_2 = allocateState(MS_1, "S1_2", stateMachine); S11_1 = allocateState(MS1_1, "S11_1", stateMachine); S11_2 = allocateState(MS1_1, "S11_2", stateMachine); addTransition(MS1_1, S11_2, 4, 0); addTransition(S11_1, MS1_1, 3, 0); addTransition(MS1_1, S2, 2, 0); addTransition(S11_1, S1_2, 1, 0); addTransition(S11_2, S1_2, 1, 0); addTransition(S1_2, MS_1, 1, 0); addTransition(S2, MS_1, 1, 0);
[OSM] Reallocating space for state machine myOptimizedStateMachine from 0 to 10 [OSM] In state machine myOptimizedStateMachine, reallocating space for state MS_1 from 0 to 10 [OSM] In state machine myOptimizedStateMachine, reallocating space for state MS1_1 from 0 to 10 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state MS1_1 from 0 to 10 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state MS1_1 from 0 to 10 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S11_1 from 0 to 10 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S11_2 from 0 to 10 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S11_1 from 10 to 20 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state S11_1 from 0 to 10 [OSM] In State machine myOptimizedStateMachine, for state S11_1, system have to relocate secondary transitions to insert the new one. [OSM] In State machine myOptimizedStateMachine, for state MS1_1, system have to relocate transitions to insert the newly allocated one. [OSM] In State machine myOptimizedStateMachine, for state MS1_1, system have to relocate secondary transitions to insert the new one. [OSM] In State machine myOptimizedStateMachine, for state S11_1, system have to relocate secondary transitions to insert the new one. [OSM] In State machine myOptimizedStateMachine, for state S11_2, system have to relocate secondary transitions to insert the new one. [OSM] In State machine myOptimizedStateMachine, for state S11_1, system have to relocate transitions to insert the newly allocated one. [OSM] In State machine myOptimizedStateMachine, for state S11_1, system have to relocate secondary transitions to insert the new one. [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S11_2 from 10 to 20 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state S11_2 from 0 to 10 [OSM] In State machine myOptimizedStateMachine, for state S11_2, system have to relocate secondary transitions to insert the new one. [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S1_2 from 0 to 10 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state S1_2 from 0 to 10 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S2 from 0 to 10 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state S2 from 0 to 10
StateMachine* stateMachine; State* MS_1, *MS1_1, *S1_2, *S11_1, *S11_2, *S2; stateMachine = allocStateMachine("myOptimizedStateMachine", "[OSM]"); setDbgParam(stateMachine, REALLOC_DBG); allocateSpaceForStates(stateMachine, 2); //<<<<<<<Added line MS_1 = allocateState(stateMachine, "MS_1", stateMachine); S2 = allocateState(stateMachine, "S2", stateMachine); allocateSpaceForStates(MS_1, 2); //<<<<<<<Added line MS1_1 = allocateState(MS_1, "MS1_1", stateMachine); S1_2 = allocateState(MS_1, "S1_2", stateMachine); allocateSpaceForStates(MS1_1, 2); //<<<<<<<Added line S11_1 = allocateState(MS1_1, "S11_1", stateMachine); S11_2 = allocateState(MS1_1, "S11_2", stateMachine); addTransition(MS1_1, S11_2, 4, 0); addTransition(S11_1, MS1_1, 3, 0); addTransition(MS1_1, S2, 2, 0); addTransition(S11_1, S1_2, 1, 0); addTransition(S11_2, S1_2, 1, 0); addTransition(S1_2, MS_1, 1, 0); addTransition(S2, MS_1, 1, 0);
[OSM] In state machine myOptimizedStateMachine, reallocating space for state MS_1 from 0 to 10
[OSM] In state machine myOptimizedStateMachine, reallocating space for state MS_1 from 0 to 2
StateMachine* stateMachine; State* MS_1, *MS1_1, *S1_2, *S11_1, *S11_2, *S2; stateMachine = allocStateMachine("myOptimizedStateMachine", "[OSM]"); setDbgParam(stateMachine, REALLOC_DBG); allocateSpaceForStates(stateMachine, 2); MS_1 = allocateState(stateMachine, "MS_1", stateMachine); S2 = allocateState(stateMachine, "S2", stateMachine); allocateSpaceForStates(MS_1, 2); MS1_1 = allocateState(MS_1, "MS1_1", stateMachine); S1_2 = allocateState(MS_1, "S1_2", stateMachine); allocateSpaceForStates(MS1_1, 2); S11_1 = allocateState(MS1_1, "S11_1", stateMachine); S11_2 = allocateState(MS1_1, "S11_2", stateMachine); allocateSpaceForTransitions(S11_1, 2); //<<<<<<<Added line allocateSpaceForTransitions(S11_2, 1); //<<<<<<<Added line allocateSpaceForTransitions(S1_2, 1); //<<<<<<<Added line allocateSpaceForTransitions(S2, 1); //<<<<<<<Added line allocateSpaceForTransitions(MS1_1, 2); //<<<<<<<Added line addTransition(MS1_1, S11_2, 4, 0); addTransition(S11_1, MS1_1, 3, 0); addTransition(MS1_1, S2, 2, 0); addTransition(S11_1, S1_2, 1, 0); addTransition(S11_2, S1_2, 1, 0); addTransition(S1_2, MS_1, 1, 0); addTransition(S2, MS_1, 1, 0);
[OSM] Reallocating space for state machine myOptimizedStateMachine from 0 to 2 [OSM] In state machine myOptimizedStateMachine, reallocating space for state MS_1 from 0 to 2 [OSM] In state machine myOptimizedStateMachine, reallocating space for state MS1_1 from 0 to 2 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S11_1 from 0 to 2 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state S11_1 from 0 to 2 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S11_2 from 0 to 1 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state S11_2 from 0 to 1 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S1_2 from 0 to 1 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state S1_2 from 0 to 1 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S2 from 0 to 1 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state S2 from 0 to 1 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state MS1_1 from 0 to 2 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state MS1_1 from 0 to 2 [OSM] In State machine myOptimizedStateMachine, for state S11_1, system have to relocate secondary transitions to insert the new one. [OSM] In State machine myOptimizedStateMachine, for state MS1_1, system have to relocate transitions to insert the newly allocated one. [OSM] In State machine myOptimizedStateMachine, for state MS1_1, system have to relocate secondary transitions to insert the new one. [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S11_1 from 2 to 12 [OSM] In State machine myOptimizedStateMachine, for state S11_1, system have to relocate secondary transitions to insert the new one. [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S11_2 from 1 to 11 [OSM] In State machine myOptimizedStateMachine, for state S11_2, system have to relocate secondary transitions to insert the new one. [OSM] In State machine myOptimizedStateMachine, for state S11_1, system have to relocate transitions to insert the newly allocated one. [OSM] In State machine myOptimizedStateMachine, for state S11_1, system have to relocate secondary transitions to insert the new one. [OSM] In State machine myOptimizedStateMachine, for state S11_2, system have to relocate secondary transitions to insert the new one.
Simply allocate the space for transition starting with highest level states (states with minimum depth).
So we had this:
allocateSpaceForTransitions(S11_1, 2); allocateSpaceForTransitions(S11_2, 1); allocateSpaceForTransitions(S1_2, 1); allocateSpaceForTransitions(S2, 1); allocateSpaceForTransitions(MS1_1, 2);
allocateSpaceForTransitions(MS1_1, 2); allocateSpaceForTransitions(S2, 1); allocateSpaceForTransitions(S1_2, 1); allocateSpaceForTransitions(S11_2, 1); allocateSpaceForTransitions(S11_1, 2);
[OSM] Reallocating space for state machine myOptimizedStateMachine from 0 to 2 [OSM] In state machine myOptimizedStateMachine, reallocating space for state MS_1 from 0 to 2 [OSM] In state machine myOptimizedStateMachine, reallocating space for state MS1_1 from 0 to 2 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state MS1_1 from 0 to 2 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state MS1_1 from 0 to 2 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S2 from 0 to 1 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state S2 from 0 to 1 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S1_2 from 0 to 1 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state S1_2 from 0 to 1 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S11_2 from 0 to 3 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state S11_2 from 0 to 1 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S11_1 from 0 to 4 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state S11_1 from 0 to 2 [OSM] In State machine myOptimizedStateMachine, for state S11_1, system have to relocate secondary transitions to insert the new one. [OSM] In State machine myOptimizedStateMachine, for state MS1_1, system have to relocate transitions to insert the newly allocated one. [OSM] In State machine myOptimizedStateMachine, for state MS1_1, system have to relocate secondary transitions to insert the new one. [OSM] In State machine myOptimizedStateMachine, for state S11_1, system have to relocate secondary transitions to insert the new one. [OSM] In State machine myOptimizedStateMachine, for state S11_2, system have to relocate secondary transitions to insert the new one. [OSM] In State machine myOptimizedStateMachine, for state S11_1, system have to relocate transitions to insert the newly allocated one. [OSM] In State machine myOptimizedStateMachine, for state S11_1, system have to relocate secondary transitions to insert the new one. [OSM] In State machine myOptimizedStateMachine, for state S11_2, system have to relocate secondary transitions to insert the new one.
addTransition(S11_1, S1_2, 1, 0); //Event #1 first addTransition(S11_2, S1_2, 1, 0); addTransition(S1_2, MS_1, 1, 0); addTransition(S2, MS_1, 1, 0); addTransition(MS1_1, S2, 2, 0); //Then event #2 addTransition(S11_1, MS1_1, 3, 0); //Event #3 addTransition(MS1_1, S11_2, 4, 0); //And finally event #4
[OSM] Reallocating space for state machine myOptimizedStateMachine from 0 to 2 [OSM] In state machine myOptimizedStateMachine, reallocating space for state MS_1 from 0 to 2 [OSM] In state machine myOptimizedStateMachine, reallocating space for state MS1_1 from 0 to 2 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state MS1_1 from 0 to 2 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state MS1_1 from 0 to 2 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S2 from 0 to 1 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state S2 from 0 to 1 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S1_2 from 0 to 1 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state S1_2 from 0 to 1 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S11_2 from 0 to 3 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state S11_2 from 0 to 1 [OSM] In state machine myOptimizedStateMachine, reallocating space for global transitions for state S11_1 from 0 to 4 [OSM] In state machine myOptimizedStateMachine, reallocating space for transitions for state S11_1 from 0 to 2
StateMachine* stateMachine; State* MS_1, *MS1_1, *S1_2, *S11_1, *S11_2, *S2; stateMachine = allocStateMachine("myOptimizedStateMachine", "[OSM]"); setDbgParam(stateMachine, REALLOC_DBG); allocateSpaceForStates(stateMachine, 2); MS_1 = allocateState(stateMachine, "MS_1", stateMachine); S2 = allocateState(stateMachine, "S2", stateMachine); allocateSpaceForStates(MS_1, 2); MS1_1 = allocateState(MS_1, "MS1_1", stateMachine); S1_2 = allocateState(MS_1, "S1_2", stateMachine); allocateSpaceForStates(MS1_1, 2); S11_1 = allocateState(MS1_1, "S11_1", stateMachine); S11_2 = allocateState(MS1_1, "S11_2", stateMachine); allocateSpaceForTransitions(MS1_1, 2); allocateSpaceForTransitions(S2, 1); allocateSpaceForTransitions(S1_2, 1); allocateSpaceForTransitions(S11_2, 1); allocateSpaceForTransitions(S11_1, 2); addTransition(S11_1, S1_2, 1, 0); addTransition(S11_2, S1_2, 1, 0); addTransition(S1_2, MS_1, 1, 0); addTransition(S2, MS_1, 1, 0); addTransition(MS1_1, S2, 2, 0); addTransition(S11_1, MS1_1, 3, 0); addTransition(MS1_1, S11_2, 4, 0);
Next: How to build the library.
Previous: How to put the debug system in good use.